High density robotic tactile mimicking human fingertip
Problem. The human fingertip has a highly stretchable skin with over 100 pressure sensors per square centimeter. This is not yet achieved in any design. Vision can identify objects, but it cannot reliably measure local contact force, slip, texture, or the shape of a contact patch without advanced tactile sensors. Useful robotic skin must also have high density and high speed for closed-loop control, with low crosstalk between neighboring pixels.
What we did. A COMSOL simulation was performed to select the material we use and validate our pattern design both mechanically and electrically. Then we perform microfabrication in our university cleanroom to produce it, which is subsequently characterized using SEM, an LCR meter, and a pressure station for its appearance, electrical, and mechanical behavior. Stretchable transistors for the active matrix were characterized using a probing station.
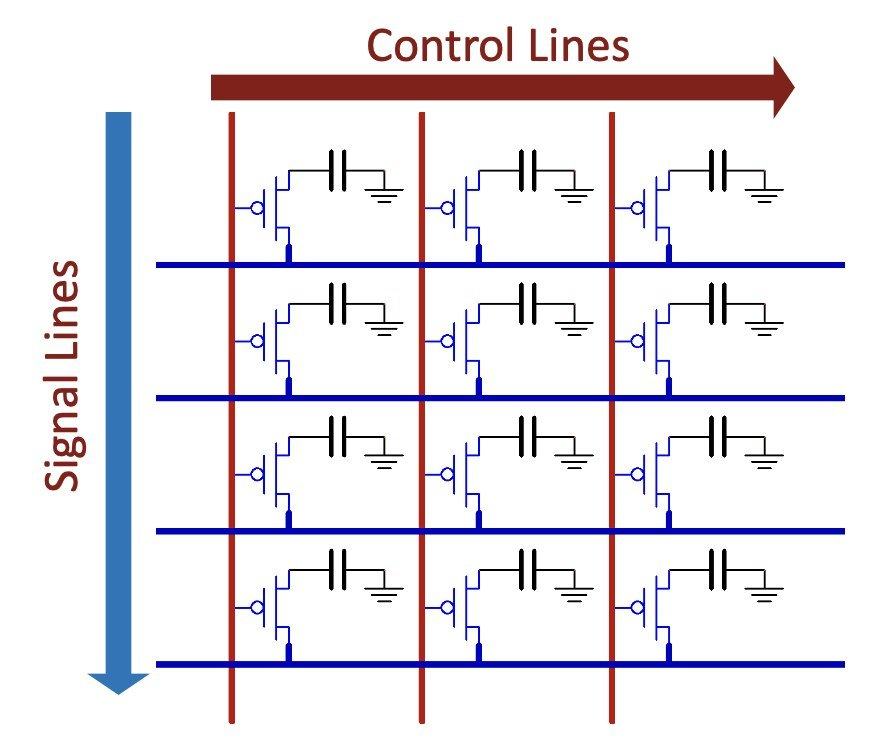
Result. This project is in progress. It builds a stretchable capacitive tactile sensor using microstructured pillar dielectrics. It then resolves the tradeoff between high density and low crosstalk by introducing a fully stretchable active matrix. This architecture also improves scanning speed for fast control feedback.
Why it matters. It contributes directly to the most critical bottleneck of the robotics field: there are no high-performance sensors for dexterous hands. It will enable clean, high-bandwidth data for robotic manipulation, teleoperation, biomedical wearables, and AR/VR interfaces.