A self driving car that traces black lines
Problem. Self driving car is the future. Do we have to spend billions of dollars in order to build one? Yes if you want to have something like Tesla FSD, and no if you only want the most simple one as possible.
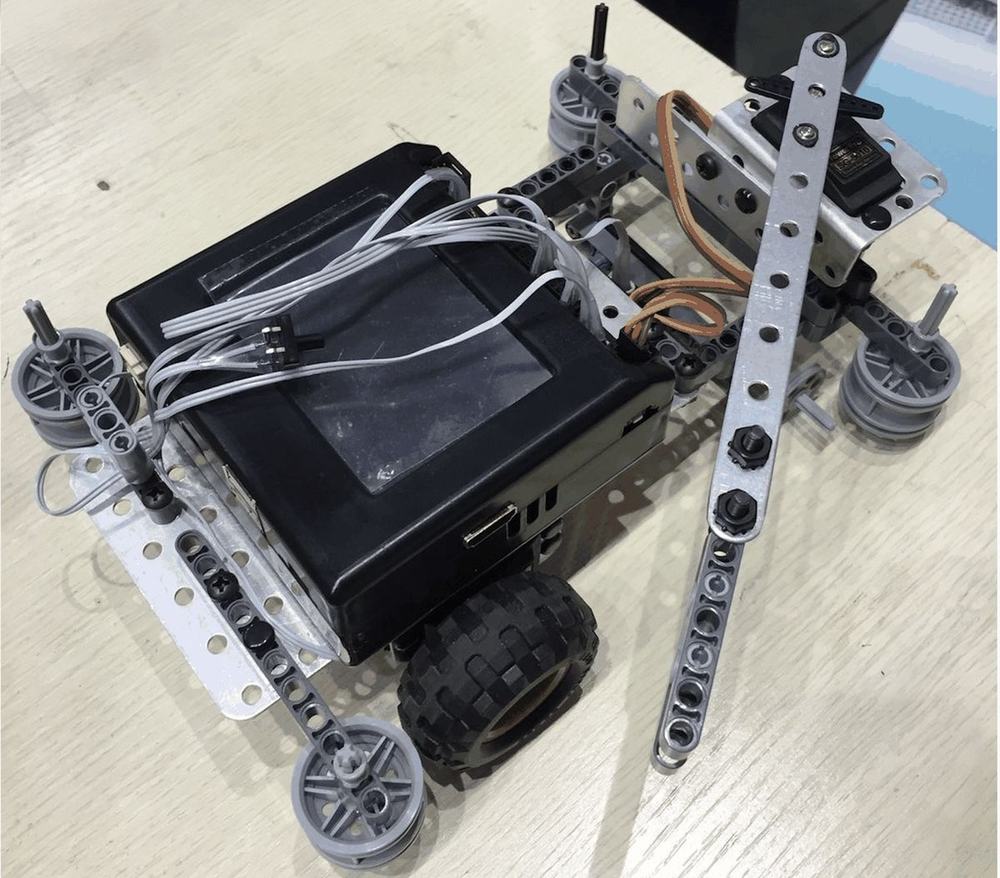
What we did. The first vehicle used one photodiode, comparator logic, motor drive, and a battery to follow a black line. If it sees a black line, turn right a little bit. If not, turn left a little bit. Thus the car drives in a zig-zag fashion. We could also add obstacle-removal feature on demand. This project required mechanical design, wiring, programming, testing, and feedback to be integrated quickly.
Result. The line-tracking cars demonstrated a working perception-control-actuation loop with very simple hardware. We participated in the Botball Robotic Contest and got silver medal in the Jiangsu province.